Дроссельный регулируемый асинхронный электропривод
|
Схемы управления асинхронными электродвигателями
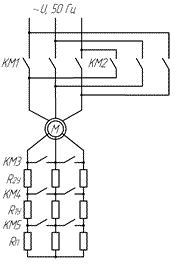
Рис.1а с пусковым сопротивлением
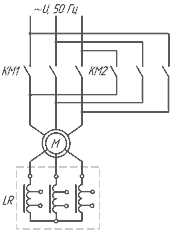
Рис.1б с дросселем в роторной цепи
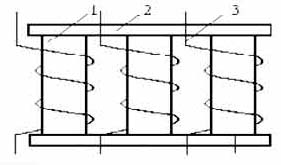
Рис.2 Конструкция дросселя
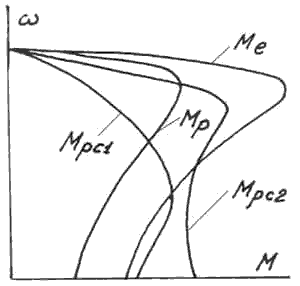
Рис.3 Механические характеристики при разных вариантах включения сопротивлений в роторной цепи
Рис.4 Экспериментальные характеристики дроссельного электропривода: а)механические; б) электромеханические
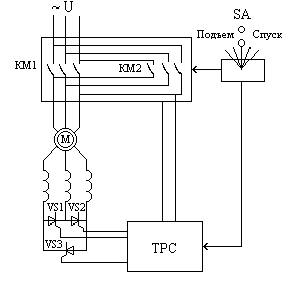
Рис.5 Дроссельный асинхронный электропривод с тиристорным регулятором скорости
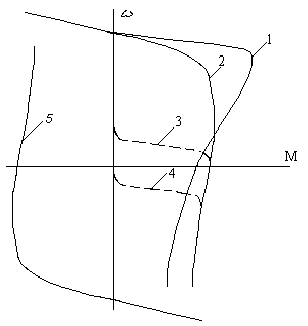
Рис.6 Механические характеристики дроссельного электропривода |
Традиционным средством ограничения пусковых токов асинхронных электродвигателей с фазным ротором является введение в цепь ротора пусковых сопротивлений (рис.1а). Сопротивления ускорения R1У, R2У ограничивают роторный ток при пуске электродвигателя и контакторами КМ3 и КМ4 при пуске последовательно выводятся из роторной цепи электродвигателя. При торможении противовключением (противотоком) в роторную цепь отключением контактора КМ5 дополнительно вводится ступень противовключения Rп. Из рис.1а видно, что для пуска и торможения электродвигателя необходима коммутационная аппаратура, усложняющая схему электропривода и требующая обслуживания. Эксплуатационный персонал всегда приветствует любое упрощение схемы управления. Такое упрощение схемы пуска имеет место при использовании пусковых дросселей, включенных в цепь ротора асинхронных электродвигателей.
Пусковой дроссель представляет собой активно-индуктивное сопротивление, значение которого за счет изменения величины и частоты тока ротора автоматически уменьшается при пуске от исходного значения до практически нулевого значения. Тогда исключается вся коммутационная аппаратура роторной цепи электродвигателя (рис.1б). Большой опыт внедрения пусковых дросселей имеет ООО «Горнозаводское объединение» г.Челябинск, которое ввело в эксплуатацию свыше 15 000 дросселей в электроприводах различных назначений (в основном на крановых механизмах) в разных регионах России и за ее пределами. Отличительной особенностью пусковых дросселей является их эксплуатационная надежность, так как они представляют собой стальной сердечник с обмоткой. Одна из конструкций пускового дросселя представлена на рис.2. По внешнему виду дроссель напоминает трехфазный трансформатор. Стержни 1 выполнены из толстостенных стальных труб, которые стягиваются шпильками между двух соединяющих пластин 2. В качестве пластин используется швеллер из обычной конструкционной стали. На стержнях располагаются обмотки 3, включаемые в цепи ротора асинхронного двигателя. Такая конструкция используется для электродвигателей мощностью до 30 кВт. Для двигателей большей мощности используются однофазные дроссели, включаемые в каждую фазу ротора. Обмотки пускового дросселя представляют собой несколько десятков витков алюминиевого провода или алюминиевой шины, сечение которых выбирается по роторному току электродвигателя. Для возможности корректировки пускового тока электродвигателя в процессе настройки электропривода, на обмотках дросселя, как правило, предусматриваются отпайки. О влиянии включения индуктивного сопротивления в цепь ротора асинхронного электродвигателя можно получить информацию в любом учебнике по основам электропривода. Так на рис.3 воспроизведены характеристики асинхронного электродвигателя при включении в цепь ротора, как чистой индуктивности, так и при различных вариантах совместного включения индуктивного и активного сопротивлений. На рис.3 характеристика Ме — естественная, Мр — при включении в цепь ротора индуктивного сопротивления, Мрс1 — при последовательном включении индуктивного и активного сопротивлений и Мрс2 — при включении параллельно индуктивному сопротивлению активного сопротивления. Сопротивление рассматриваемого дросселя представляет собой последовательное соединение индуктивного и активного сопротивлений, которому соответствует характеристика Мрс1 на рис.3, но значения указанных сопротивлений изменяются с изменением скорости при пуске электродвигателя. Как известно, с увеличением скорости электродвигателя при его пуске уменьшается ток ротора I2 и его частота f2, стремясь к нулевым значениям при синхронной скорости. Эффект ограничения пусковых токов асинхронного электродвигателя объясняется тем, что при пуске по материалу сердечников дросселя протекают вихревые токи. Вихревые токи и магнитный поток проходят только по тонкому поверхностному слою сердечника дросселя толщиной от 2 мм до 4 мм. При запуске дроссельного электропривода энергия скольжения, которая при пуске с сопротивлениями в роторной цепи шла на нагрев этих сопротивлений теперь выделяется в сердечниках пускового дросселя вследствие циркуляции в них вихревых токов (в дросселе на рис.2 — в металлических трубах). Поэтому возникает проблема нагрева дросселя. Но если нет нагрева, то нет и желаемой дроссельной характеристики. Характеристика Мрс1 на рис.3 соответствует фиксированным значениям индуктивности L и активного сопротивления r в роторной цепи. В случае же пускового дросселя значения L и r, вследствие указанных выше электромагнитных процессов в сердечниках (трубах), при пуске с ростом скорости автоматически уменьшаются, то есть как бы постепенно корректируется характеристика Мрс1. Механические и электромеханические характеристики дроссельного электропривода (снятые в лабораторных условиях с использованием автоматизированной системы экспериментального исследования электроприводов) представлены соответственно на рис.4а и рис.4б. Характеристики сняты для электродвигателя МTF111-6 с Рн=3,5кВт, Uн=380В, I1=10,4А, I2=15А, Мmax=85H*м, nн=895 об/мин. Так как лабораторная установка имела ограниченную мощность, то питание двигателя осуществлялось от сети пониженного напряжения 220В. На рис.4 представлены характеристики естественная (ест) при закороченных кольцах ротора, с числом витков обмоток дросселя 60 и с числом витков 100. Характеристики изображены в относительных единицах (о.е.). За базовые величины приняты следующие значения: для частоты вращения электродвигателя w=104,7 рад/с, для момента М=12,5Нм, для тока статора I1=10.4A и для тока ротора I2=15А. На рис. 4б зависимости I1(w) и I2(w) различаются тем, что при синхронной скорости ток статора I2 равен нулю. Из рис.4а следует, что механические характеристики дроссельного электропривода своеобразны. При скоростях от нуля до скорости примерно 60% от синхронной скорости момент, развиваемый двигателем, стремится сохранить свое значение. Такие характеристики являются желательными для плавного пуска электродвигателя. Конечно, жесткость дроссельной характеристики на рабочей части ниже, чем на естественной характеристике двигателя, то есть рабочая скорость механизма снижается на 3%-8%. Активно-индуктивный характер сопротивления пускового дросселя позволяет при определенных его параметрах обеспечивать пусковой момент больше, чем на естественной характеристике при существенном ограничении пускового тока. Это видно из рис.3, когда пусковой момент на характеристике Мрс1 несколько больше пускового момента на характеристике Ме. Когда возникает необходимость увеличивать пусковой момент в схеме с пусковым дросселем без усложнения схемы управления электропривода, параллельно обмоткам дросселя включаются активные сопротивления. Характеристики электропривода приближаются к виду характеристики Мрс2. Однако при этом следует увеличивать число витков дросселя. В процессе пуска при малых скоростях проявляется действие активных сопротивлений. При больших скоростях значение сопротивления пускового дросселя становится значительно меньше параллельно включенного активного сопротивления и тем самым влияние последнего автоматически исключается и дальнейший пуск идет как обычный дроссельный. Разумеется, в данном случае должны быть согласованы параметры пускового дросселя и активных сопротивлений. Отсутствие коммутационной аппаратуры, а также исключение пиков тока и момента существенно повышает надежность работы электропривода, значительно увеличивается межремонтный цикл механизмов, снижается время на ремонт и обслуживание электропривода особенно в тяжелых условиях работы механизмов и агрессивной окружающей среде (запыленность,загазованность, высокая температура воздуха). ООО «Горнозаводское объединение» имеет большой опыт использования пусковых дросселей в электроприводах крановых механизмов. Опыт показывает, что при монтаже нового крана стоимость электрооборудования и электроматериалов при использовании дросселей уменьшается до 50%, а объем электромонтажных работ сокращается до 70%. Дроссельные электроприводы показали свою эффективность не только на механизмах мостов и тележек кранов, но и на механизмах подъема. Механизмы подъема требуют режимов посадочной скорости и выбора слабины канатов. Эти режимы могут быть реализованы толчковым режимом работы или использованием разработанного совместно со специалистами Южно-Уральского государственного университета тиристорного регулятора скорости (РСТ) дроссельного электропривода. Функциональная схема такого электропривода для механизма подъема крана представлена на рис.5. Роторная «звезда» электродвигателя М размыкается и в нее включаются тиристоры VS1…VS3. На РСТ подается напряжение с колец ротора и сигналы о положении командоаппарата SA. РСТ включается при подаче на статорную цепь электродвигателя напряжения контакторами КМ1 и КМ2 и формирует импульсы управления тиристорами. Особенностью регулятора скорости тиристорного является его высокая эксплуатационная надежность вследствие использования бесконтактных тиристорных ключей. Механическая характеристика 3 дроссельного электропривода с тиристорным регулятором скорости (рис.6) обеспечивает выбор слабины канатов подъема, характеристика 4 — низкие посадочные скорости. При низких посадочных скоростях электродвигатель работает в режиме электромагнитного тормоза, то есть он включается на подъем, но под действием груза вращается на спуск. Для спуска груза с большей скоростью электродвигатель включается в направлении спуска (на характеристику 5) и его спуск идет в генераторном режиме. Спуск порожнего крюка или груза с малой массой также осуществляется при работе электродвигателя на характеристике 5. В настоящее время разработан тиристорный регулятор скорости (РСТ), способный плавно регулировать скорость от 0 до 70% номинальной скорости на всем диапозоне момента, ограниченного дроссельной характеристикой. На основании рассмотренного можно сделать следующие выводы:
|