|
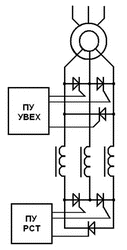
Рис.1 Функциональная схема ротора электродвигателя с регулятором скорости РСТ и УВЕХ
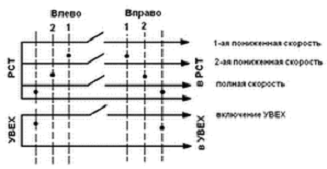
Рис.2 Программа командоаппарата механизмов вылета стрелы и поворота портального крана с РСТ И УВЕХ
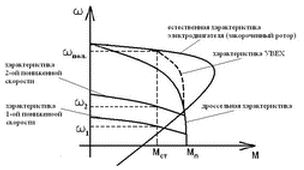
Рис.3 Механические характеристики работы дроссельного регулируемого электропривода на механизмах вылета стрелы и поворота портального крана
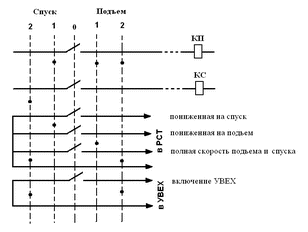
Рис.4 Программа командоаппарата механизма подъема портального крана с РСТ и УВЕХ
|
Дроссельный регулируемый электропривод производства ООО «Горнозаводское объединение» представляет собой ряд увязанных между собой устройств, комплексно обеспечивающих повышенные эксплуатационные качества электроприводам портальных, мостовых и козловых кранов.
Дроссельный регулируемый электропривод включает в себя дроссель пусковой типа ДПД, регулятор скорости тиристорный типа РСТ и устройство вывода на естественную характеристику типа РСТ-В (УВЕХ) (рис.1).
Работа механизмов вылета стрелы и поворота портального крана.
Дроссельный регулируемый электропривод подключается к существующему командоаппарату (рис.2).
· Разгон.
Применяя дроссельный регулируемый электропривод, обеспечивается возможность работы в следующих режимах:
Запуск на первой пониженной скорости (15-25% от wном. — положение контроллера №1).
Разгон на второй пониженной скорости (30-60% от wном. — положение контроллера №2), до полной скорости (положение рукоятки №3).
На третьем положении в работу включается устройство вывода на естественную характеристику РСТ-В (УВЕХ) и плавно закорачивает ротор двигателя. В результате обеспечивается максимально возможная скорость с максимально «жесткой» механической характеристикой закороченного двигателя. Поэтому скорости поворота башни и вылета стрелы будут мало зависеть от действующей на них ветровой нагрузки, что позволит машинистам кранов работать более эффективно. Механические характеристики приведены на рис.3.
· Торможение.
Обеспечивается возможность торможения переключением контроллера с положения полной скорости на первую и вторую пониженные скорости, далее переводя двигатель в режим противовключения, применив первую и вторую пониженные скорости и полную скорость обратного направления. Эти тормозные режимы позволяют выбрать такой тормозной момент, который обеспечит плавное, но интенсивное, торможение даже с учетом ветровой нагрузки встречного и попутного направления.
· Синхронизация работы двигателей поворота крана.
Основное достоинство пусковых дросселей — без любых схемных ухищрений иметь возможность синхронизировать скорости, темп разгона и торможения в динамике любого количества двигателей за счет своей более мягкой механической характеристики. Из рис.3 видно, что относительно большое рассогласование по скорости ликвидируется достаточно малым моментом. Выравнивание скоростей w1 и w2 на каждом двигателе достигается простым заданием одинаковых уставок на регуляторе скорости РСТ каждого двигателя.
Работа механизма подъема портального крана.
Применение дроссельного регулируемого электропривода позволяет иметь в первом положении командоаппарата «на подъем» и «на спуск» пониженную скорость (от 10% номинальной и выше) и во втором положении (с включением УВЕХ) — полную скорость «закороченного» двигателя (рис.4). Следует обратить внимание на то, что спуск груза на пониженной скорости осуществляется в тормозном режиме (двигатель включен на «подъем», а груз раскручивает его вниз), поэтому пониженная скорость «на спуск» осуществляется только для грузов массой не менее 30% номинальной грузоподъемности крана. В грейферном режиме данной проблемы нет, так как сам грейфер имеет вес большей величины. При работе в крюковом режиме вес, меньший 30% от грузоподъемности, опускается в силовом режиме на втором положении командоаппарата.
· Торможение механизма подъема при подходе груза к крайнему положению.
В случае применения пониженной скорости «на спуск» (груз имеет вес более 30% грузоподъёмности крана) торможение груза осуществляется переключением с полной скорости на пониженную скорость «на спуск» (перевод положения контроллера со второго положения «спуск» на первое положение «спуск»). При настройке первой пониженной скорости на 10-15% от номинальной скорости груз опускается в автоматическом режиме до самого «пола». При достижении крайней нижней точки двигатель останавливается самостоятельно и только после этого командоаппарат переводится в положение «0». Остановка двигателя происходит вследствие того, что исчезает активный момент, который создает вес груза, а двигатель, включенный «на подъём», поднять данный груз не в состоянии. Указанный режим особенно привлекателен для работы машиниста крана в невидимых для него зонах (например, трюм корабля).
Кроме повышения эффективности работы, применение пониженной скорости «на спуск» резко уменьшает количество включений, что не только уменьшает нагрев двигателя, но и позволяет экономить электроэнергию.
При спуске в силовом режиме (груз имеет вес менее 30% грузоподъёмности крана) при подходе к крайнему нижнему положению применяется «толчковый» режим (как и в схеме с активными сопротивлениями) переводом командоаппарата из положения «на спуск» в положение «0».
|